Welcome: Tecote Company Limited
Language:




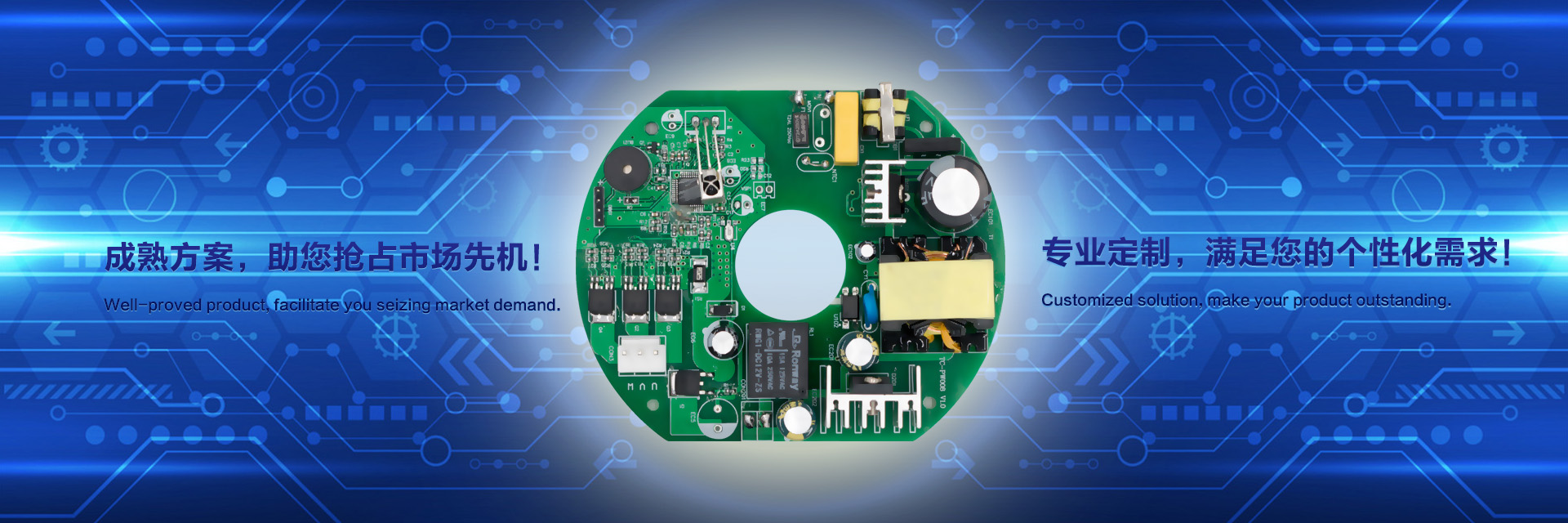
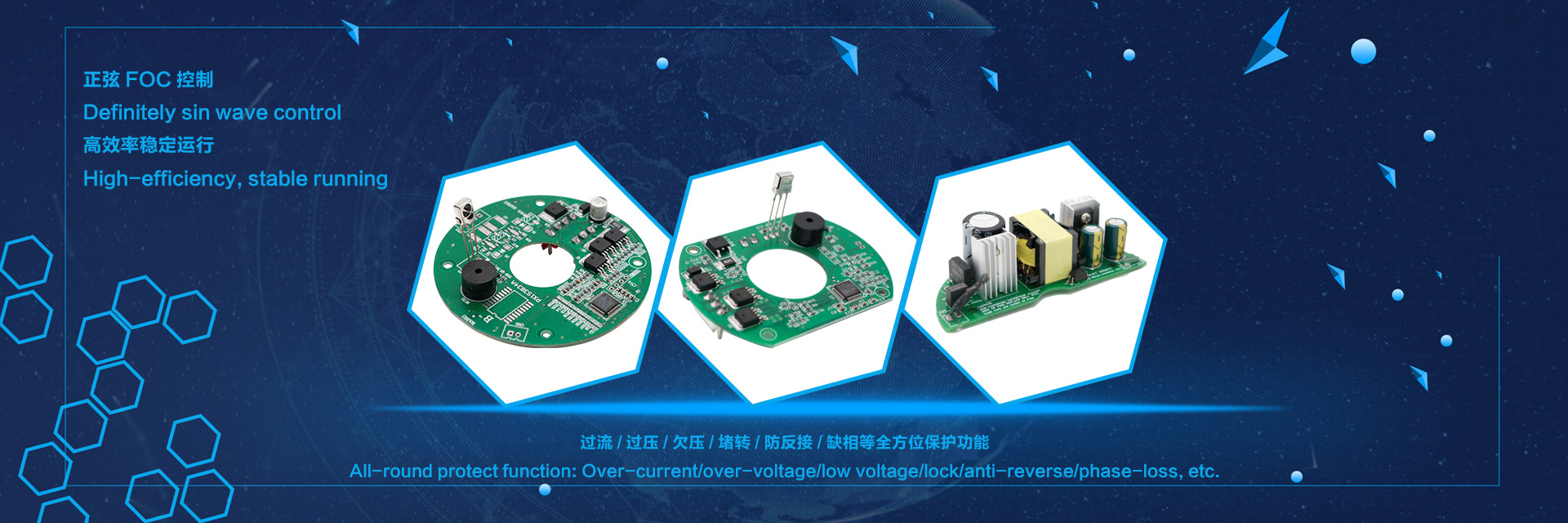
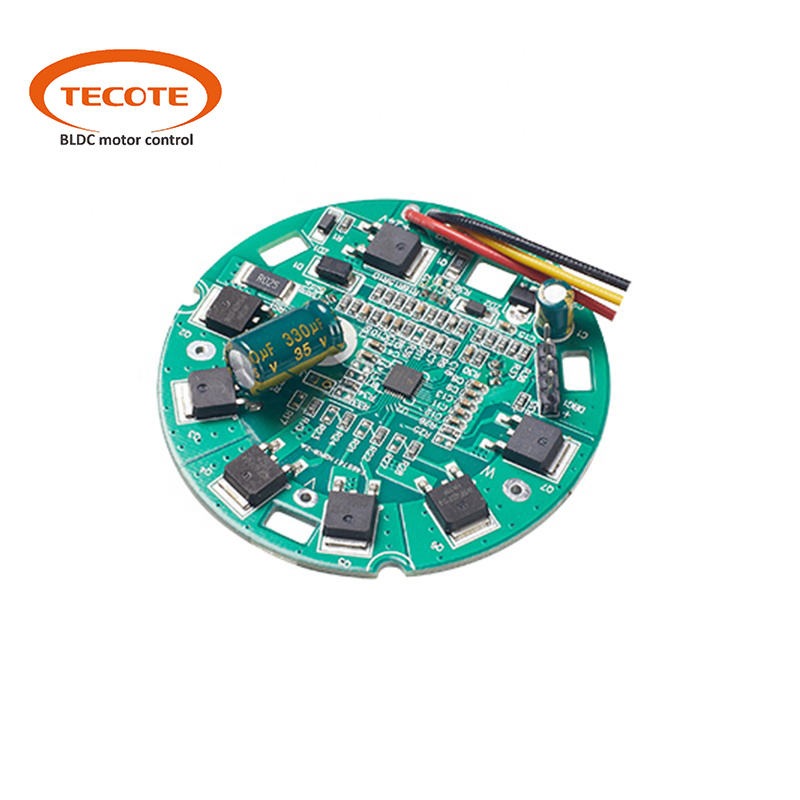
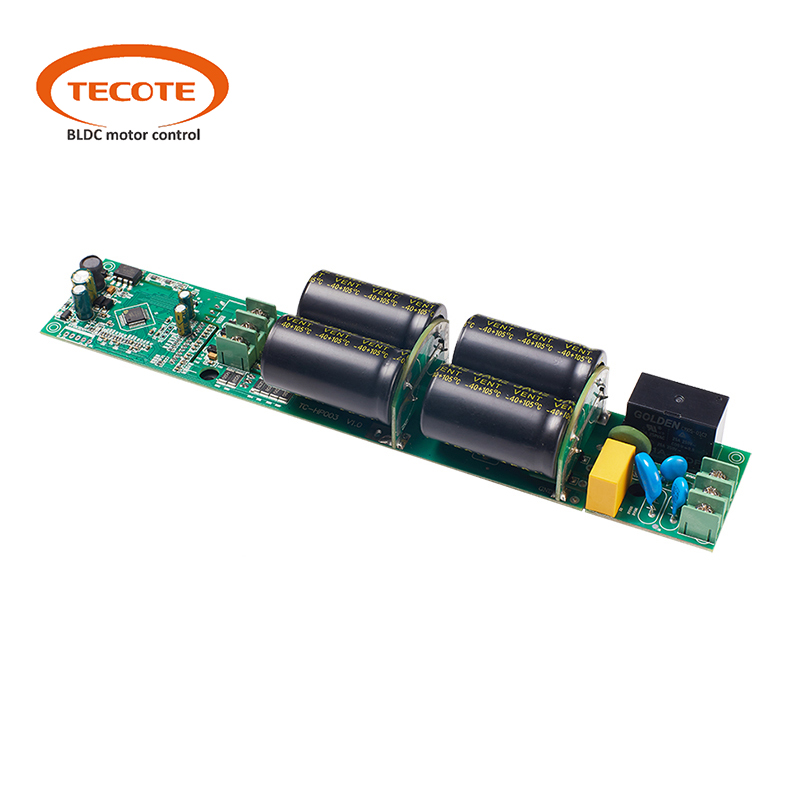
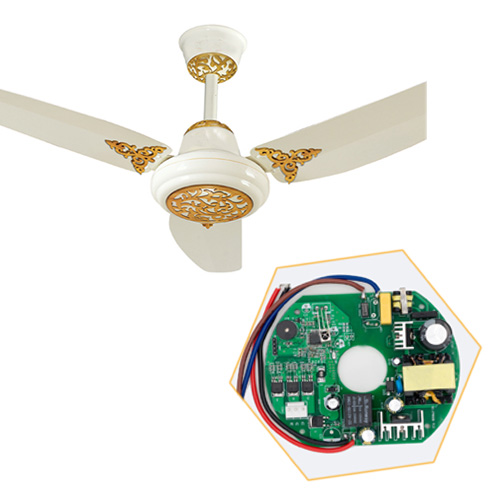
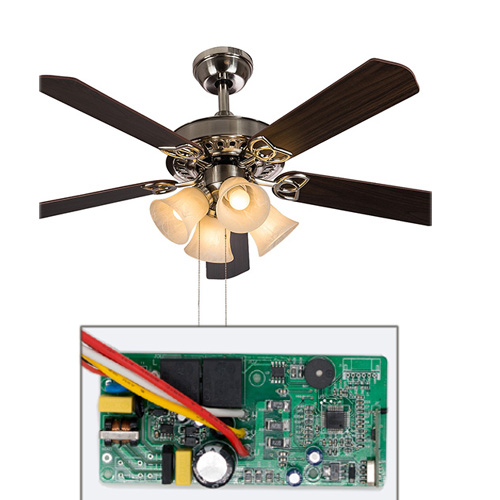
Tecote Co., Ltd is an high and new technology enterprise devoted in BLDC motor control technology and its application, focus on R&D, production and marketing of BLDC motor driver, dedicate providing cost-effective, stable and quality-reliable product and service to customers. Our products is widely used in BLDC...
Contact: Becky Wang
Phone: +86 17727920147
Tel: +86 (0)755 21017515
Email: info@tecote.com
Add: 305, Building A, ICC Park, No. 163, Huawang Road, Dalang street, Longhua District, Shenzhen.518109